




گلیسونچرخ دنده های مخروطی مارپیچینوع خاصی از چرخدندههای مخروطی هستند که برای انتقال قدرت بین شفتهای متقاطع، معمولاً با زاویه ۹۰ درجه، طراحی شدهاند. چیزی که سیستم گلیسون را متمایز میکند، هندسه دندانه منحصر به فرد و روش ساخت آن است که حرکت روان، ظرفیت گشتاور بالا و عملکرد بیصدا را فراهم میکند. این چرخدندهها به طور گسترده در انتقال قدرت خودرو، صنعت و هوافضا که در آنها قابلیت اطمینان و دقت بسیار مهم است، استفاده میشوند.
سیستم گلیسون برای بهبود روشهای مستقیم وچرخ دنده های مخروطی صفربا معرفی یک دندانه منحنی و مارپیچی شکل. این شکل مارپیچی امکان درگیری تدریجی بین دندانهها را فراهم میکند و به طور قابل توجهی سر و صدا و لرزش را کاهش میدهد و در عین حال سرعت چرخش و ظرفیت بار بالاتری را فراهم میکند. این طراحی همچنین نسبت تماس و استحکام سطح را افزایش میدهد و انتقال قدرت کارآمد را تحت بارهای سنگین یا دینامیکی تضمین میکند.
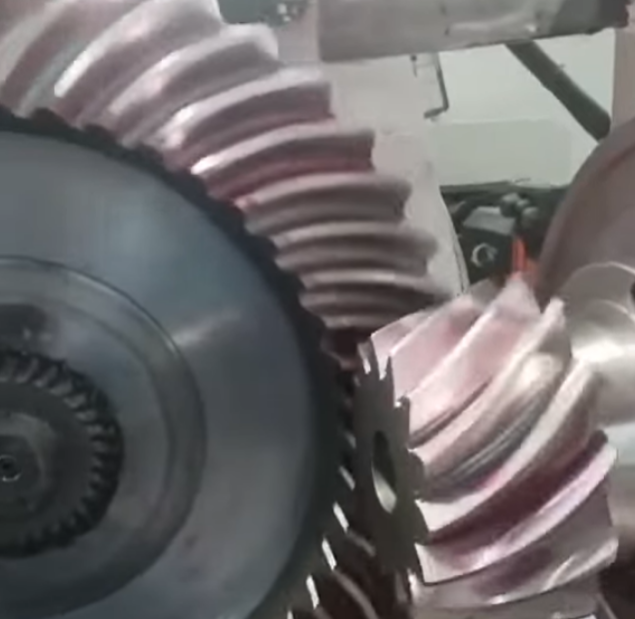
هر جفت چرخدنده مخروطی مارپیچی گلیسون شامل یک پینیون و یک چرخدنده جفتشونده است که با هندسهای منطبق تولید میشوند. فرآیند تولید بسیار تخصصی است. این فرآیند با آهنگری یا ریختهگری دقیق قطعات فولادی آلیاژی مانند 18CrNiMo7-6 آغاز میشود و به دنبال آن برش خشن، فرزکاری یا شکلدهی برای تولید فرم اولیه چرخدنده انجام میشود. روشهای پیشرفتهای مانند ماشینکاری 5 محوره، اسکیوینگ و برش سخت، دقت ابعادی بالا و سطح نهایی بهینه را تضمین میکنند. پس از عملیات حرارتی مانند کربوریزاسیون (58-60 HRC)، چرخدندهها تحت عمل سایش یا سنگزنی قرار میگیرند تا درگیری کامل بین پینیون و چرخدنده حاصل شود.
هندسه چرخدندههای مخروطی مارپیچ گلیسون توسط چندین پارامتر حیاتی تعریف میشود - زاویه مارپیچ، زاویه فشار، فاصله مخروط گام و عرض سطح. این پارامترها به طور دقیق محاسبه میشوند تا الگوهای تماس صحیح دندانه و توزیع بار تضمین شود. در طول بازرسی نهایی، ابزارهایی مانند دستگاه اندازهگیری مختصات (CMM) و آنالیز تماس دندانه (TCA) تأیید میکنند که مجموعه چرخدنده مطابق با کلاس دقت مورد نیاز DIN 6 یا ISO 1328-1 است.

در حال کار، مارپیچ گلیسونچرخ دنده های مخروطیحتی در شرایط سخت، راندمان بالا و عملکرد پایداری را ارائه میدهند. دندانههای منحنی، تماس مداوم را فراهم میکنند و تمرکز تنش و سایش را کاهش میدهند. این امر آنها را برای دیفرانسیلهای خودرو، گیربکسهای کامیون، ماشینآلات سنگین، سیستمهای نیروی محرکه دریایی و ابزارهای برقی ایدهآل میکند. علاوه بر این، قابلیت سفارشیسازی هندسه دندانه و فاصله نصب به مهندسان این امکان را میدهد که طراحی را برای گشتاور، سرعت و محدودیتهای فضایی خاص بهینه کنند.
چرخدنده مخروطی مارپیچی نوع گلیسون - جدول محاسبه کلیدی
| مورد | فرمول / عبارت | متغیرها / یادداشتها |
|---|---|---|
| پارامترهای ورودی | (z_1، z_2، m_n، alpha_n، سیگما، b، T) | دندانههای پینیون/چرخدنده (z)؛ ماژول نرمال (m_n)؛ زاویه فشار نرمال (\alpha_n)؛ زاویه شفت (\Sigma)؛ عرض صفحه (b)؛ گشتاور منتقلشده (T). |
| قطر مرجع (میانگین) | (d_i = z_i، m_n) | i = ۱ (پینیون)، ۲ (دنده). قطر میانگین/مرجع در مقطع نرمال. |
| زاویههای گام (مخروطی) | (\delta_1،\ \delta_2) به طوری که (\delta_1+\delta_2=\Sigma) و (\dfrac{\sin\delta_1}{d_1}=\dfrac{\sin\delta_2}{d_2}) | زوایای مخروطی سازگار با نسبتهای دندانه و زاویه شفت را حل کنید. |
| فاصله مخروط (فاصله اوج گام) | (R = \dfrac{d_1}{2\sin\delta_1} = \dfrac{d_2}{2\sin\delta_2}) | فاصله از رأس مخروط تا دایره گام که در امتداد ژنراتریکس اندازهگیری میشود. |
| گام دایرهای (معمولی) | (p_n = \pi m_n) | گام خطی در مقطع نرمال. |
| ماژول عرضی (تقریبی) | (m_t = \dfrac{m_n}{\cos\beta_n}) | (\beta_n) = زاویه مارپیچ معمولی؛ در صورت نیاز بین مقاطع معمولی و عرضی تبدیل میشود. |
| زاویه مارپیچ (رابطه میانگین/عرضی) | (\tan\beta_t = \tan\beta_n \cos\delta_m) | (\delta_m) = زاویه مخروط میانگین؛ از تبدیلات بین زوایای نرمال، عرضی و مارپیچ میانگین استفاده کنید. |
| توصیه عرض صورت | (b = k_b، m_n) | (k_b) که معمولاً بسته به اندازه و کاربرد از ۸ تا ۲۰ انتخاب میشود؛ برای مقدار دقیق به طراحان مراجعه کنید. |
| ضمیمه (میانگین) | (تقریباً m_n) | تقریب استاندارد ضمیمه کامل؛ برای مقادیر دقیق از جداول دقیق نسبت دندانه استفاده کنید. |
| قطر خارجی (نوک) | (d_{o,i} = d_i + 2a) | من = ۱،۲ |
| قطر ریشه | (d_{f,i} = d_i – 2h_f) | (h_f) = ددندوم (از تناسبات سیستم دنده). |
| ضخامت دندانه دایرهای (تقریبی) | (s \approx \dfrac{\pi m_n}{2}) | برای هندسه پخدار، از ضخامت اصلاحشده از جداول دندانه برای دقت استفاده کنید. |
| نیروی مماسی در دایره گام | (F_t = \dfrac{2T}{d_p}) | (T) = گشتاور؛ (d_p) = قطر گام (از واحدهای ثابت استفاده کنید). |
| تنش خمشی (ساده شده) | (\sigma_b = \dfrac{F_t \cdot K_O \cdot K_V}{b \cdot m_n \cdot Y}) | (K_O) = ضریب اضافه بار، (K_V) = ضریب دینامیک، (Y) = ضریب فرم (هندسه خمش). برای طراحی از معادله خمش کامل AGMA/ISO استفاده کنید. |
| تنش تماسی (نوع هرتز، ساده شده) | (\sigma_H = C_H \sqrt{\dfrac{F_t}{d_p, b} \cdot \dfrac{1}{\frac{1-\nu_1^2}{E_1}+\frac{1-\nu_2^2}{E_2}}}) | ثابت هندسی (C_H)، مدولهای الاستیک ماده (E_i،\nu_i) و نسبتهای پواسون. برای تأیید از معادلات تنش تماسی کامل استفاده کنید. |
| نسبت تماس (کلی) | (\varepsilon = \dfrac{\text{کمان کنش}}{\text{گام پایه}}) | برای چرخدندههای مخروطی، با استفاده از هندسه مخروط گام و زاویه مارپیچ محاسبه کنید؛ معمولاً با جداول یا نرمافزار طراحی چرخدنده ارزیابی میشوند. |
| تعداد مجازی دندانها | (z_v \approx \dfrac{d}{m_t}) | برای بررسیهای تماسی/برش زیرین مفید است؛ (m_t) = ماژول عرضی. |
| حداقل بررسی دندانهها/بریدگی زیرین | از حداقل شرایط دندانه بر اساس زاویه مارپیچ، زاویه فشار و نسبت دندانهها استفاده کنید | اگر (z) کمتر از حداقل باشد، برش از زیر یا ابزار مخصوص مورد نیاز است. |
| تنظیمات دستگاه/برش (مرحله طراحی) | زاویههای سر تیغه، چرخش گهواره و شاخصبندی را از هندسه سیستم چرخدنده تعیین کنید | این تنظیمات از هندسه چرخدنده و سیستم برش گرفته شدهاند؛ از رویه ماشین/ابزار پیروی کنید. |
فناوری تولید مدرن، مانند دستگاههای برش و سنگزنی چرخدندههای مخروطی CNC، کیفیت و قابلیت تعویض پایدار را تضمین میکند. با ادغام طراحی به کمک کامپیوتر (CAD) و شبیهسازی، تولیدکنندگان میتوانند قبل از تولید واقعی، مهندسی معکوس و آزمایش مجازی انجام دهند. این امر زمان و هزینه را به حداقل میرساند و در عین حال دقت و قابلیت اطمینان را بهبود میبخشد.

به طور خلاصه، چرخدندههای مخروطی مارپیچی گلیسون ترکیبی بینظیر از هندسه پیشرفته، استحکام مواد و دقت تولید را نشان میدهند. توانایی آنها در انتقال قدرت روان، کارآمد و بادوام، آنها را به یک جزء ضروری در سیستمهای محرکه مدرن تبدیل کرده است. چه در بخشهای خودرو، صنعتی یا هوافضا استفاده شوند، این چرخدندهها همچنان به تعریف برتری در حرکت و عملکرد مکانیکی ادامه میدهند.
زمان ارسال: ۲۴ اکتبر ۲۰۲۵