




چرخدنده سیارهای به عنوان یک مکانیزم انتقال نیرو، به طور گسترده در روشهای مختلف مهندسی مانند گیربکس، جرثقیل، گیربکس سیارهای و غیره استفاده میشود. برای گیربکس سیارهای، میتوان آن را در بسیاری از موارد جایگزین مکانیزم انتقال نیروی چرخدنده محور ثابت کرد. از آنجا که فرآیند انتقال نیرو از طریق تماس خطی است، درگیری طولانی مدت باعث خرابی چرخدنده میشود، بنابراین شبیهسازی استحکام آن ضروری است. لی هونگلی و همکارانش از روش مشبندی خودکار برای مشبندی چرخدنده سیارهای استفاده کردند و به این نتیجه رسیدند که گشتاور و حداکثر تنش خطی هستند. وانگ یانجون و همکارانش نیز چرخدنده سیارهای را از طریق روش تولید خودکار مشبندی کردند و استاتیک و شبیهسازی مودال چرخدنده سیارهای را شبیهسازی کردند. در این مقاله، عناصر چهاروجهی و ششوجهی عمدتاً برای تقسیم مش استفاده میشوند و نتایج نهایی برای بررسی برآورده شدن شرایط استحکام، تجزیه و تحلیل میشوند.
۱. ایجاد مدل و تحلیل نتایج
مدلسازی سهبعدی چرخدندههای سیارهای
چرخ دنده سیاره ایعمدتاً از چرخدنده حلقهای، چرخدنده خورشیدی و چرخدنده سیارهای تشکیل شده است. پارامترهای اصلی انتخاب شده در این مقاله عبارتند از: تعداد دندانههای حلقه چرخدنده داخلی ۶۶، تعداد دندانههای چرخدنده خورشیدی ۳۶، تعداد دندانههای چرخدنده سیارهای ۱۵، قطر خارجی حلقه چرخدنده داخلی ۱۵۰ میلیمتر، مدول ۲ میلیمتر، زاویه فشار ۲۰ درجه، عرض دندانه ۲۰ میلیمتر، ضریب ارتفاع جمع ۱، ضریب لقی ۰.۲۵ و سه چرخدنده سیارهای وجود دارد.
تحلیل شبیهسازی استاتیکی چرخدندههای سیارهای
تعریف خواص مواد: سیستم چرخدنده سیارهای سهبعدی ترسیمشده در نرمافزار UG را به ANSYS وارد کنید و پارامترهای مواد را مطابق جدول 1 زیر تنظیم کنید:

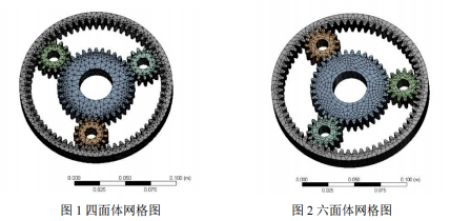
شبکهبندی: شبکه اجزای محدود به چهاروجهی و ششوجهی تقسیم میشود و اندازه پایه المان 5 میلیمتر است. از آنجا کهچرخ دنده سیاره ای، چرخدنده خورشیدی و حلقه چرخدنده داخلی در تماس و مشبک هستند، شبکه قطعات تماس و مشبک متراکم شده و اندازه آن 2 میلیمتر است. ابتدا، از شبکههای چهاروجهی، همانطور که در شکل 1 نشان داده شده است، استفاده میشود. در مجموع 105906 عنصر و 177893 گره تولید میشود. سپس، همانطور که در شکل 2 نشان داده شده است، از شبکه ششوجهی استفاده میشود و در مجموع 26957 سلول و 140560 گره تولید میشود.
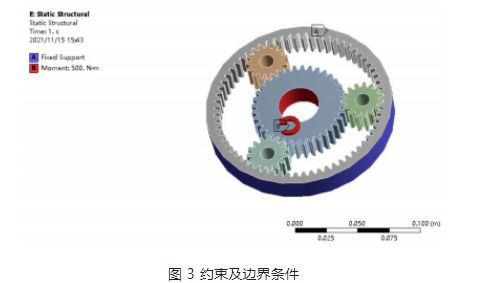
اعمال بار و شرایط مرزی: با توجه به ویژگیهای کاری چرخدنده سیارهای در کاهنده، چرخدنده خورشیدی چرخدنده محرک، چرخدنده سیارهای چرخدنده محرک و خروجی نهایی از طریق حامل سیارهای است. حلقه چرخدنده داخلی را در ANSYS ثابت کنید و گشتاور 500 نیوتن متر را به چرخدنده خورشیدی اعمال کنید، همانطور که در شکل 3 نشان داده شده است.
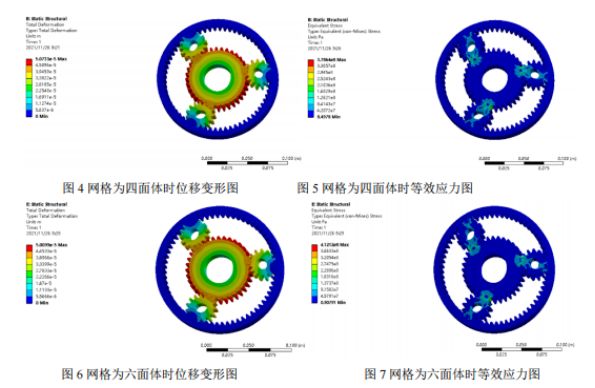
پسپردازش و تحلیل نتایج: نمودار جابجایی و نمودار تنش معادل تحلیل استاتیکی بهدستآمده از دو بخش شبکه در زیر آورده شده است و تحلیل مقایسهای انجام شده است. از نمودار جابجایی دو نوع شبکه، مشخص میشود که حداکثر جابجایی در موقعیتی رخ میدهد که چرخدنده خورشیدی با چرخدنده سیارهای درگیر نمیشود و حداکثر تنش در ریشه چرخدنده درگیر رخ میدهد. حداکثر تنش شبکه چهاروجهی 378 مگاپاسکال و حداکثر تنش شبکه ششوجهی 412 مگاپاسکال است. از آنجایی که حد تسلیم ماده 785 مگاپاسکال و ضریب ایمنی 1.5 است، تنش مجاز 523 مگاپاسکال است. حداکثر تنش هر دو نتیجه کمتر از تنش مجاز است و هر دو شرایط استحکام را برآورده میکنند.
۲. نتیجهگیری
از طریق شبیهسازی المان محدود چرخدنده سیارهای، نفوگرام تغییر شکل جابجایی و نفوگرام تنش معادل سیستم چرخدنده به دست میآید که از آن حداکثر و حداقل دادهها و توزیع آنها درچرخ دنده سیاره ایمدل را میتوان یافت. محل حداکثر تنش معادل، محلی است که احتمال خرابی دندانههای چرخدنده در آن بیشتر است، بنابراین باید در هنگام طراحی یا ساخت به آن توجه ویژهای شود. از طریق تجزیه و تحلیل کل سیستم چرخدنده سیارهای، خطای ناشی از تجزیه و تحلیل تنها یک دندانه چرخدنده برطرف میشود.
زمان ارسال: ۲۸ دسامبر ۲۰۲۲